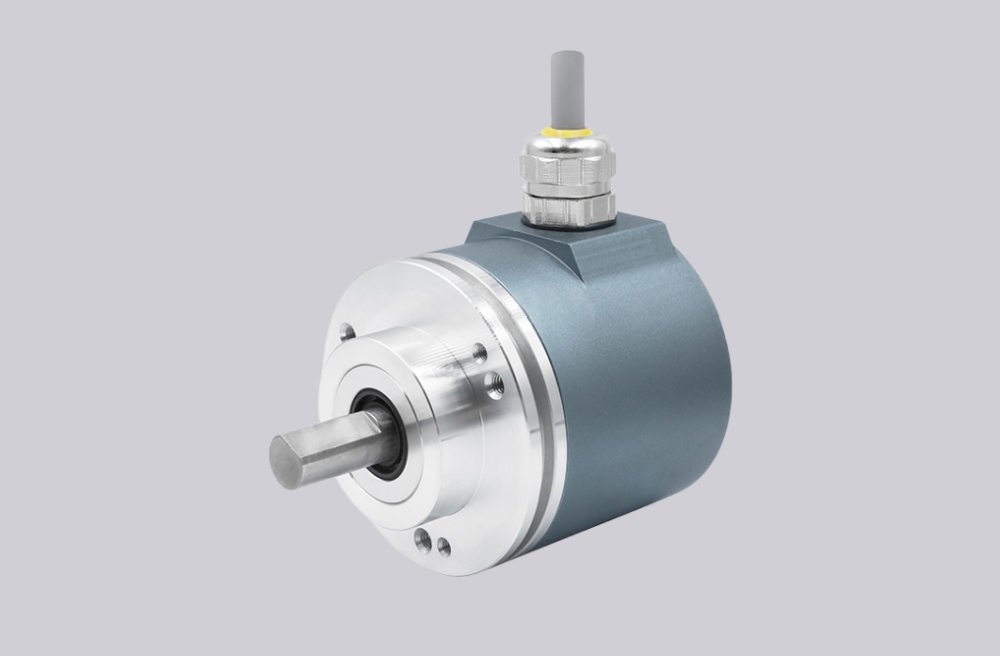
在工業自動化、機器人及各類運動控制系統中,Incremental Encoders是一種用于檢測轉速、方向和位置變化的關鍵傳感器。其通過輸出連續脈沖信號,將機械運動轉換為電信號,為控制系統提供實時反饋。
在實際工程中,增量編碼器的核心作用并不是獲取“當前位置”,而是描述“運動變化過程”。是否選擇增量編碼器,關鍵在于系統是否需要絕對位置,以及是否允許回零操作。
什么是Incremental Encoders
增量型編碼器通過檢測旋轉軸或直線運動,輸出連續脈沖信號,用于表示位置變化。控制系統通過對脈沖進行計數和計算,實現對速度、位移和方向的判斷。
其典型信號結構包括:
A相與B相信號用于輸出正交脈沖
通過相位差判斷旋轉方向
通過脈沖數量計算位移變化
通過脈沖頻率計算轉速
Z相信號用于提供參考零點
這一機制決定了:增量編碼器只能反映變化,而不能直接提供絕對位置。
增量編碼器適用于哪些場景
增量編碼器通常適用于以下應用:
電機轉速檢測與閉環控制
輸送系統中的速度與長度測量
包裝、印刷及自動化設備中的位置計數
多軸系統中的同步控制
對成本與響應速度要求較高的工業系統
這些應用的共同特點是:
?? 關注運動變化,而不是當前位置
原文中列出的自動化產線、機器人、物流設備等場景,是典型應用方向
增量編碼器與絕對值編碼器的區別
這是選型中最關鍵的判斷點:
增量編碼器輸出的是脈沖變化信號,需要通過計數計算位置
絕對值編碼器可直接輸出當前位置,斷電后無需回零
因此:
如果系統需要斷電記憶位置,應優先選擇絕對值編碼器
如果系統只需要速度、方向或位移變化,增量編碼器通常更高效
?? 本質區別不是精度,而是“是否需要位置記憶”
什么時候優先選擇增量編碼器
在工程項目中,具備以下條件時,通常優先考慮增量編碼器:
系統允許回零或重新定位
控制目標以速度或變化量為主
不需要長期記錄絕對位置
設備結構簡單,追求穩定與成本控制
控制系統原生支持A/B相輸入
在這些情況下,增量編碼器通常是更合理的選擇。
選型時優先確認哪些關鍵因素
在實際應用中,建議按以下順序進行判斷:
首先確認系統是否只需要變化量,而不是絕對位置
其次確認控制系統支持的信號類型,如TTL、HTL、RS422等
然后確認分辨率是否滿足控制精度需求
再確認安裝結構,包括軸徑、法蘭及安裝方式
最后評估環境條件,如振動、溫度、防護等級
相比直接選型號,這種方式更符合工程邏輯。
分辨率怎么理解更合理
分辨率是增量編碼器選型中最常被關注的參數,但并不是越高越好。分辨率過低會影響控制精度,而過高則可能增加系統負擔。
更合理的判斷方式是結合:
機械傳動比
速度范圍
控制系統處理能力
實際精度需求
在多數工業場景中,信號穩定性往往比單純提高分辨率更重要。
增量編碼器的使用邊界
雖然增量編碼器應用廣泛,但在以下情況下需要謹慎選擇:
系統需要斷電后保持當前位置
設備無法進行回零操作
位置丟失會影響安全或控制邏輯
需要連續記錄多圈位置信息
在這些場景中,通常更適合使用絕對值編碼器。
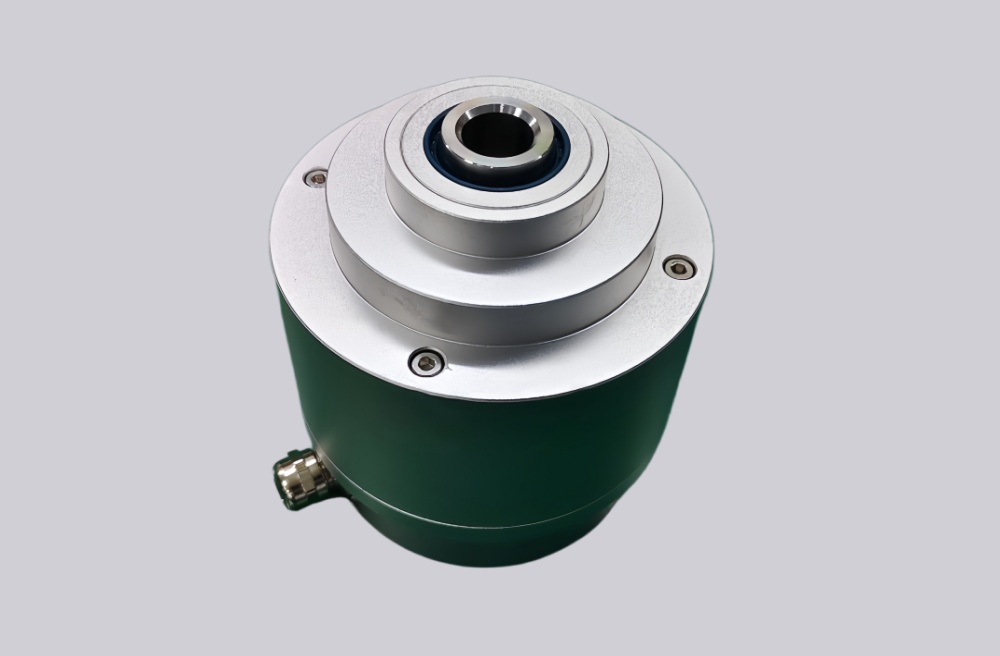
國產增量編碼器的應用判斷
原文強調國產方案在結構、接口及交付方面的優勢
從工程角度來看,是否適合采用國產方案,應重點確認:
接口是否與控制系統匹配
安裝結構是否一致
分辨率與供電參數是否滿足要求
環境適應能力是否符合現場工況
項目是否存在認證或品牌限制
在這些條件明確的前提下,國產方案通常在交付周期和定制能力方面具有優勢。
常見選型誤區
將增量編碼器用于需要絕對位置的系統
只關注分辨率,而忽略系統匹配
忽略斷電后位置丟失問題
未確認安裝結構是否匹配
這些問題會影響系統穩定性。
常見問題
增量編碼器可以直接獲取絕對位置嗎
不能,只能通過計數計算,斷電后會丟失
增量編碼器分辨率越高越好嗎
不一定,應根據系統需求合理匹配
增量編碼器適合高精度控制嗎
可以,但需要系統具備穩定的信號處理能力
Summary
增量型編碼器的選型,本質上是控制方式、應用需求與系統結構之間的匹配過程。在只需要速度與變化信息的場景中,增量編碼器通常是一種結構成熟、響應快速且應用廣泛的反饋方案。
Tags: Incremental Encoders
Sividi Encoder
TEL: +86 15050450799 (WeChat same number)

? Kunshan Sividi Co. Site Map Su ICP No. 14036688  Su Gong Network Security No. 32058302003763
Su Gong Network Security No. 32058302003763